Task
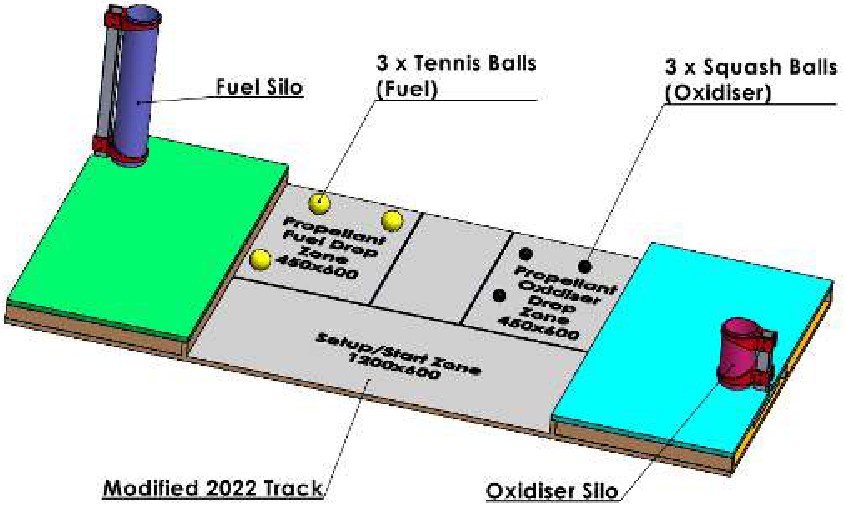
The goal of this Warman challenge is to create a small-scale prototype of a transport system that can collect and deliver six spherical vessels to their respective silos. This must be done within a 120-second time limit, otherwise, the robot must stop wherever it is currently at in the process. The official rules document.
Modules
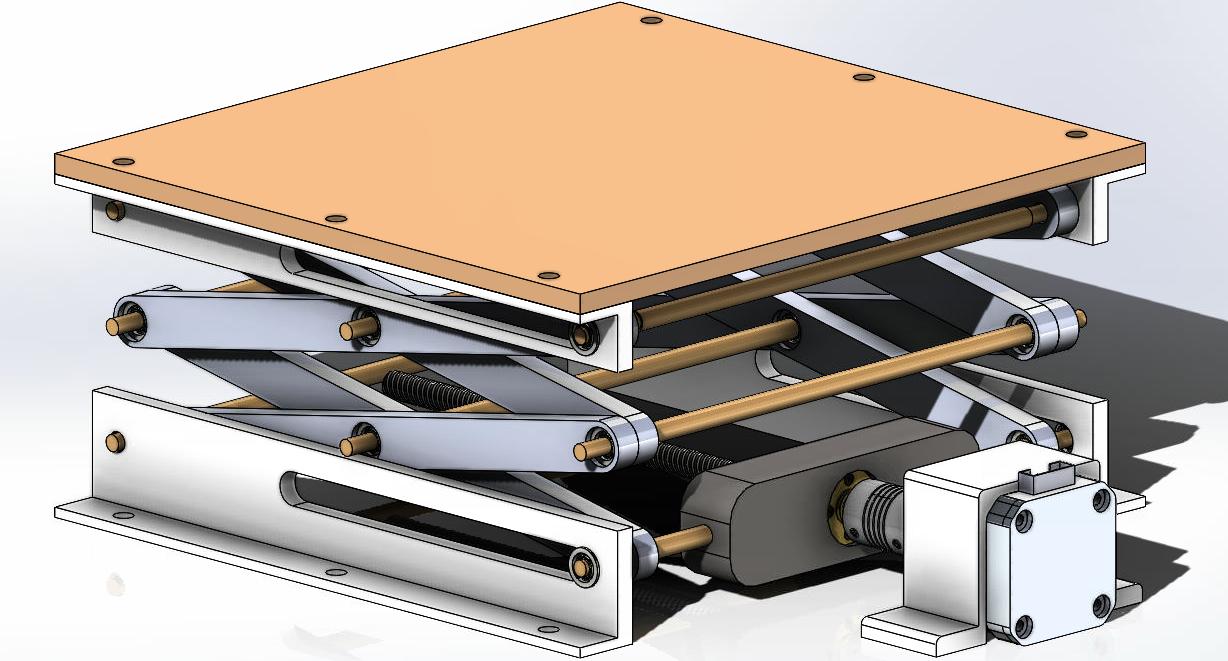
Scissor Lift
The design of the scissor lift was one of the main contributions I made to the robot. The purpose of the scissor lift was to raise the tennis balls to the correct height for depositing.
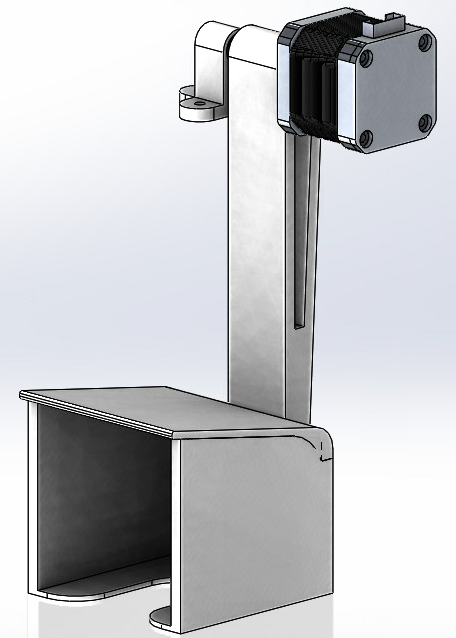
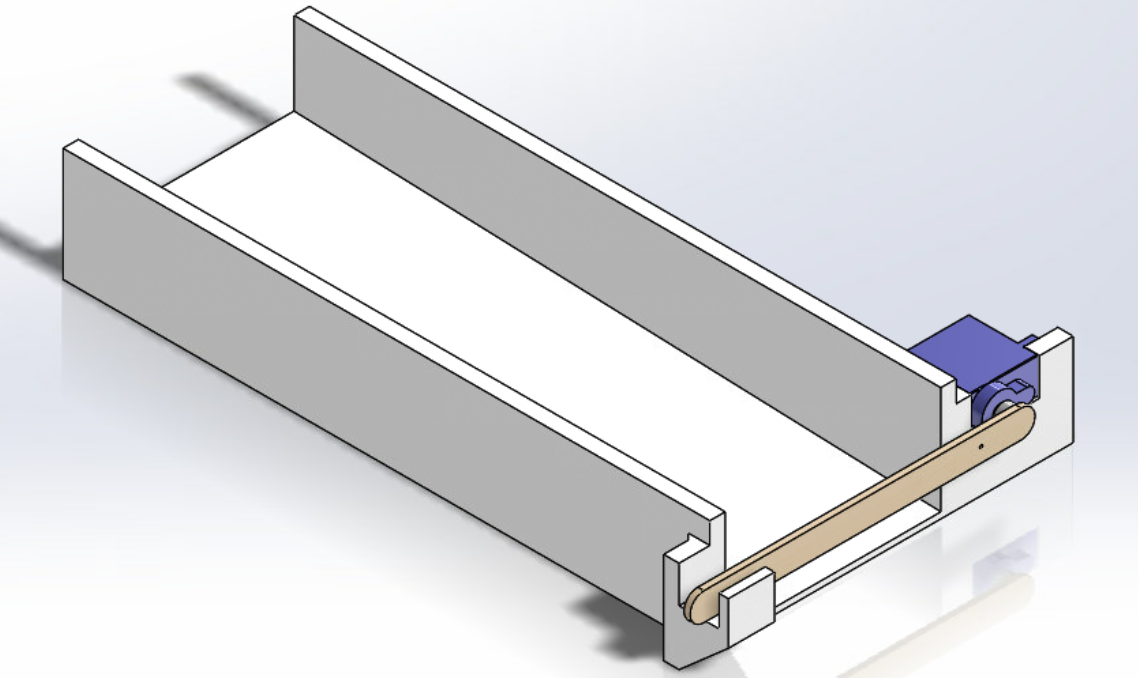
Scooping Arm
I engineered the scooping arm to gather objects from the base of the track, lifting and depositing them onto the scissor lift. This system leverages the elevation of the objects above the platform, to facilitate the scooping action. The top of the bucket as a slight angle on it, which allows the balls to roll off onto the scissor lift when the arm is lifted vertically.
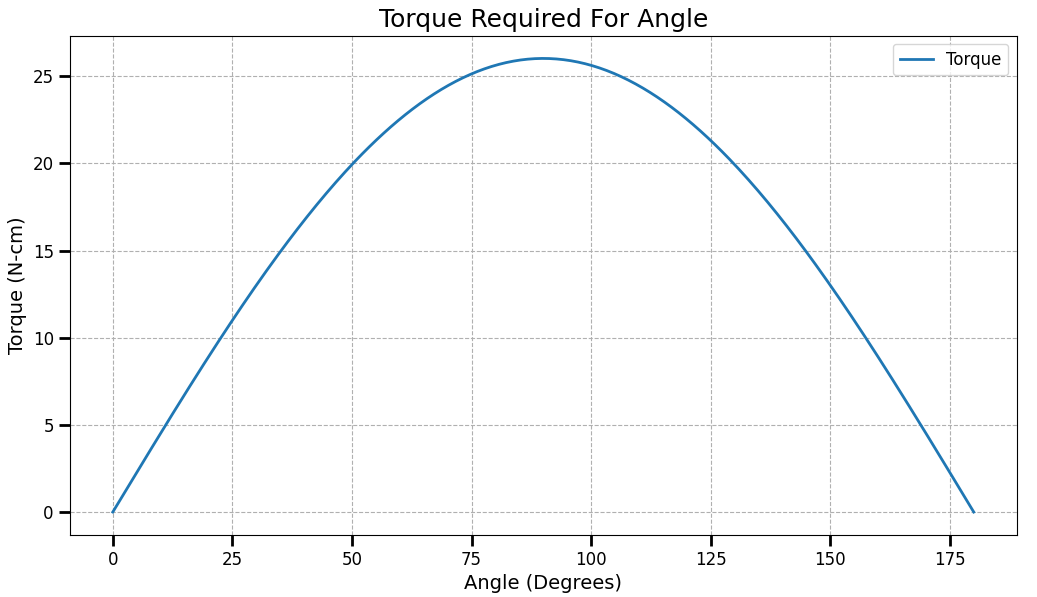
The design of this system came with the challenge of ensuring the motor had enough torque to lift the tennis balls up. The torque required to lift the tennis ball up was calculated to ensure the right motor was used. Since the maximum torque required was 26Nm, our group used a stepper motor with an advertised torque of 56Nm.
Deposit Mechanism
The goal of this module was to store and deposit the tennis and squash balls into the silos. It should fit onto the top of the scissor lift, and be as light as possible.
Course Navigation
Navigating the Track: Exploring Options
Our group faced the challenge of ensuring the robot could reliably navigate the track. We considered two primary options:
-
Hardcode the Movements:
- Guessing the correct motor movements for a successful run.
- Adjusting values through trial and error.
-
Use Sensors:
- Employing sensors such as ultrasonic, infrared, and lidar.
Exploring Pixy Camera Capabilities
I had recently become aware of a product called the ‘Pixy Camera’ and was interested to try out its capabilities as a means of track navigation. To be a viable solution, the pixy camera had to be able to detect the following reliably:
- Tennis balls
- Squash balls
- Storage silos
To test the pixy camera, I prototyped a small robot that follows a tennis ball based on its colour hue. Below is a short video of the first trials. Click to view code on GitHub
The camera could successfully detect a tennis ball, but after attempting the same test on a squash ball at university, I realised the camera only detects objects that have a colour hue. This was a major problem since the squash balls are black, and the silos are white. Unfortunately this ruled out the use of the pixy camera in our robot.
Outcome
On the test day, our robot had some current drawage issues with the wheel-driving motors. This led to our robot not being able to overcome its own inertia. The challenge allowed for one “correction tap” of the robot during the test. Our group used this to help it overcome its inertia. Points were given for successfully holding tennis/squash balls, so our group changed its goal to sucessfully pick up three tennis balls by lining them up in a row.